如果要問,迄今為止人類有過哪些「成熟」的發明。
差評君,第一個想到的就是——自行車!

「你已經是輛成熟的自行車了,當然可以自己騎自己了!」
只要速度夠快,哪怕是在佈滿了石頭崎嶇不平的山間小路上,自行車也可以自如前行(對,在無人的情況下)。

自行車可以說是人類發明過的最高效、萬能的人力驅動交通工具了,也是我們生活中最常見的一種交通工具之一。

在荷蘭,自行車的人均保有量曾一度飆到每100人就有109輛自行車的驚人數量。帶菜籃子購物用的,戶外對付山地用的,可以載孩子給媽媽專用的,一個人備上好幾輛,妥妥的車比人多。
不過差友們可能想不到的是,「自行車到底是怎麼保持平衡的」這個問題,至今仍然是個困擾科學界一個多世紀的「未解之謎」!
要知道,自行車在18世紀末就已經被法國人發明出來了。
而這個可以稱得上是世界上第一輛自行車的玩意兒,其實跟「自行」沒有半毛錢關係。
它沒有驅動裝置,沒有腳踏板,看上去就是個長了兩個輪子的長條板凳,得靠腳在地上「行走」才能帶動它前進,而想轉向?好,人先給我下來,抱着車體再換方向吧。。。
這設計瞅着安全係數有點低

還好這個讓整個屏幕都透露出原始氣息的設計,沒過幾年就得到了改良。
在1817年,來自德國的森林管理員德萊斯發明出了可以控制車子方向的車把子。
雖然還是得靠人腳蹬地來驅動,但好歹,不用搬運轉向了。
1817年自行車的復刻版

至於它騎起來是什麼樣子——
既然是靠全靠雙腳蹬地驅動,人在上面動起來的樣子,應該差不多是這樣的吧↓

接下來的幾十年的時間裏,自行車的設計經過了歐洲多個國家的人不斷改進,代代演變,期間一度變成了非常反人類的造型,比如,下面這個版本的自行車,想坐上去,簡直比翻上馬背還難。。。
自行車的駕馭難度,曾一度和雜耍齊飛

終於在1874年的時候被一個英國人勞森改造出了人人都可以使用的正常模樣。
勞森發明了一種精密的機械結構,也就是我們現在所說的鉸鏈,利用鉸鏈,前輪可以在後輪的傳動下運動,比馬背還高的座椅也終於有機會從直徑超過一米的前輪上移向更低更靠後的位置。
看到這裏,估計差友們也多多少少體會到了,自行車,從一開始就不是依託縝密的物理學、數學理論公式設計出來的。
它的誕生,完全依靠人類的生活經驗!
不過存在即合理,自行車不僅存在了快兩個世紀,而且還不斷「進化」,到現在已經可以不藉助人力自己保持平衡了,如此神奇的現象,肯定應該有個能用來解釋它的科學依據吧?
於是乎,科學家們開始倒回去反推它的設計原理,結果發現,誒?這玩意兒玄學了,居然沒法兒用現有的科學理論去解釋!
從19世紀末開始,科學界就已經發佈了各種論文來解釋自行車的穩定性。其中最主流的一種觀點認為,自行車的平衡原理是「陀螺效應」。
差友們小時候應該都玩過陀螺吧?
高速旋轉狀態下的陀螺,不管遇到怎樣的外力干涉,它的平衡都很難被破壞掉。
這是因為物體在快速旋轉狀態下,會產生一種叫做「角動量」的物理概念。
還是拿陀螺來舉例子。當陀螺不轉動時,它會因為重力倒下,但一旦它開始高速旋轉,就會產生一個方向唯一的角動量。
在下面這張圖中,紅色箭頭所指的方向就是旋轉中陀螺角動量的方向。
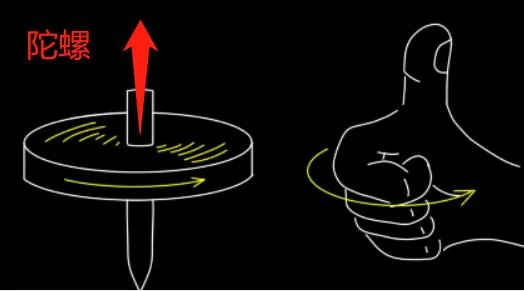
用右手定則判定角動量方向
角動量方向一旦形成,就非常難以改變,也就是說如果它的方向是向上的,那就很難把它改變成朝向右上,或者左上。
角動量不是一種力,但它可以表達物體旋轉時的狀態。

而角動量的這一作用有多強大,看下面這張 GIF你就知道了。。。
上圖左下角的陀螺儀沒有旋轉時,一鬆手就掉了;而當它高速旋轉時,產生的角動量甚至能讓它戰勝重力的影響,繼續掛在繩子上旋轉。
哪怕是質量更大的輪胎也一樣。
而此時,如果對這個高速旋轉的物體施加外力,只有兩種情況,一,物體會為了保持角動量的方向而產生平移;二,物體會被迫終止正在進行的運動,直接「飛」出去。。。
差友們理解到這裏其實就差不多了。

生活中有很多現象都遵循「陀螺效應」,比如打水漂,很多人打水漂失敗的原因,多半是因為石頭的旋轉速度還不足以形成讓它保持方向的角動量。

以及玩兒飛盤,飛盤從被扔出去到落回到你的手裏,過程中一直遵循角動量方向不變的規律。
自行車當然也一樣了,只要輪胎的旋轉速度足夠高,不管車上是否有人操控,它們都會保持一個幾乎恆定的方向平移前進,(這也是為什麼,速度越快的自行車突然轉向,越容易翻車)
這套理論是不是足夠完整,足以說服你——自行車的平衡原理就是因為「陀螺效應」了呢?
實不相瞞,差評君也差不多完全被說服了,這套理論也主導了自行車研究界好長一段時間,但在1970年,突然有個叫瓊斯的人突然跳出來說:根本不是因為「陀螺效應」!
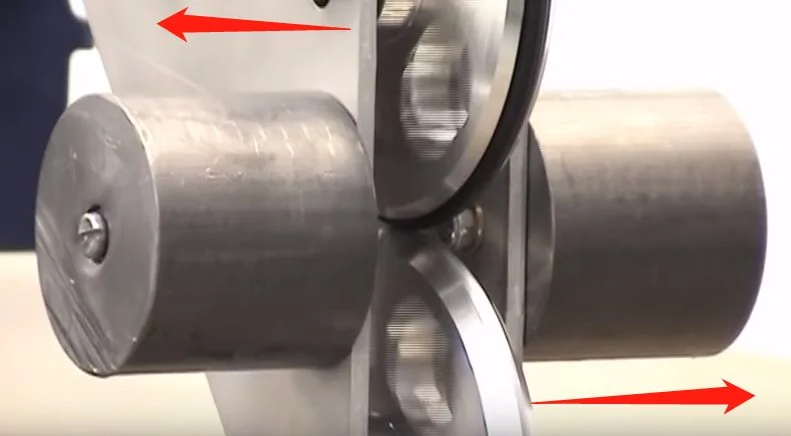
瓊斯不僅說了,還設計出了一個不帶陀螺效應的自行車,做了實驗發佈在了一本叫《今日物理》雜誌上!

這輛特製自行車特別之處在於它有一大一小兩個前輪!大前輪在小前輪的傳動下,會以不同的旋轉方向轉動,也就是說這兩個輪子的角動量是完全相反的,並且相互抵消,所以這輛車成功在理論上消除了「陀螺效應」!
可神奇的是,這輛車也能成功保持平衡。。。差評君感覺三觀受到了衝擊。。。
如果不是因為「陀螺效應」,那自行車又是因為什麼才能保持平衡的呢?
瓊斯提出了一個新理論——「前輪尾跡」理論。

聽上去倒是挺高級的,簡單來說就是因為車輪軸心比車的方向把更靠前,當車傾倒時,車頭也會朝同一個方向歪掉。

這就意味着在自行車行進的時候,傾倒的自行車靠着歪掉的車頭,把重心改回到了自行車重心的下方,得以保持平衡。
差友們仔細回想一下,騎車的時候,如果車就要朝着左邊倒了,是不是本能地會把車頭把向左邊,來維持平衡?
這套理論看上去也很有道理,看得差評君又幾乎信了。
可在2011年,又有人跳出來,做出了一個挑戰極限的終極版自行車——它不僅挑戰了「陀螺效應」,同時也推翻了「前輪尾跡」理論。
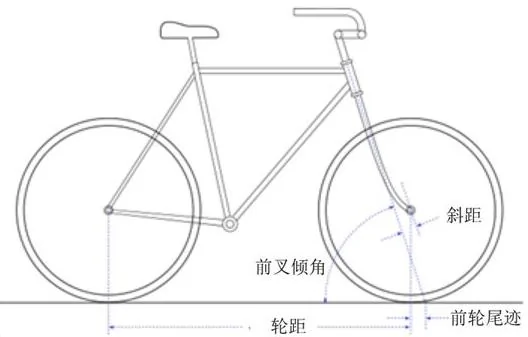
這輛自行車的特別之處有兩點:它有四個輪子;同時前輪的軸心比車把靠後!

前輪、後輪分別由兩個輪子組成,而這兩個輪子的旋轉方向是相反的,也就是說前後輪的角動量都被抵消了。
紅色箭頭表示角動量的方向

而車把比前輪靠後,意味着靠「前輪尾跡」改變車體重心,保持自行車平衡的理論也站不住腳跟了。
問題來了,這輛車真的還可以不靠人體掌控,自己保持平衡嗎?

答案是:當然可以。。。
據說,看了的科學家都哭了。。。而在此之後,直到今天,依然沒有人找出能完美解釋自行車保持平衡的原理。
可能看到這裏,差友們想問了,科學家為啥非得和自行車過不去呢?
因為這正是他們畢生努力的意義所在啊:探索這個世界的真相,找到這個世界運轉的真相。
在這一點上,幾百年來我們都做得很成功,從宇宙運行到微觀粒子,科學家都能找到合理的解釋。
但低下頭,盯着自己從家裏騎到實驗室通勤用的自行車,發現自己竟然連這麼個簡單玩意兒都沒弄懂,這對他們來說簡直就像強迫症在一張平整的白紙上發現了一條抹不平的摺痕一樣。。。
而也正是因為科學家們這樣錙銖必較、上下求索的精神,我們的科技才得以不斷被突破,常議常新。

也許自行車保持平衡的真正原因,就藏在競技精神里吧!


















{kind=link}