11月19日是世界道路交通事故受害者紀念日,據聯合國2021年的一項數據顯示,每年,全世界約有130萬人死亡和5000萬人受傷。而視覺盲區便是駕駛中最大的潛在威脅之一。
此前的一項實測表明,一輛SUV的盲區內竟能裝下75名孩子。

一名幼兒園老師坐進一輛SUV警車的駕駛位並戴上眼罩。隨後,75名幼兒園小朋友分別站在車輛四周的盲區內。待車輛前方的孩子蹲在地上後,老師摘掉了眼罩。然而,通過環顧車輛周圍和觀察後視鏡,老師竟連一個孩子也沒有發現。
而生活中也時常看到,由於盲區的存在而導致的交通事故。那麼有沒有手段可以減小盲區?或者削弱盲區帶來的危害?今天就讓我們盤點一下相關的「貼心」科技~
認識盲區
在介紹應對盲區的科技手段前,我們先來認識一下盲區。盲區產生的基本原理其實就是光線沿直線傳播,當駕駛員坐在駕駛位置上時,由於視角的限制以及車體的遮擋必然會有很大區域的物體反射的光線無法傳播到駕駛員的眼中。
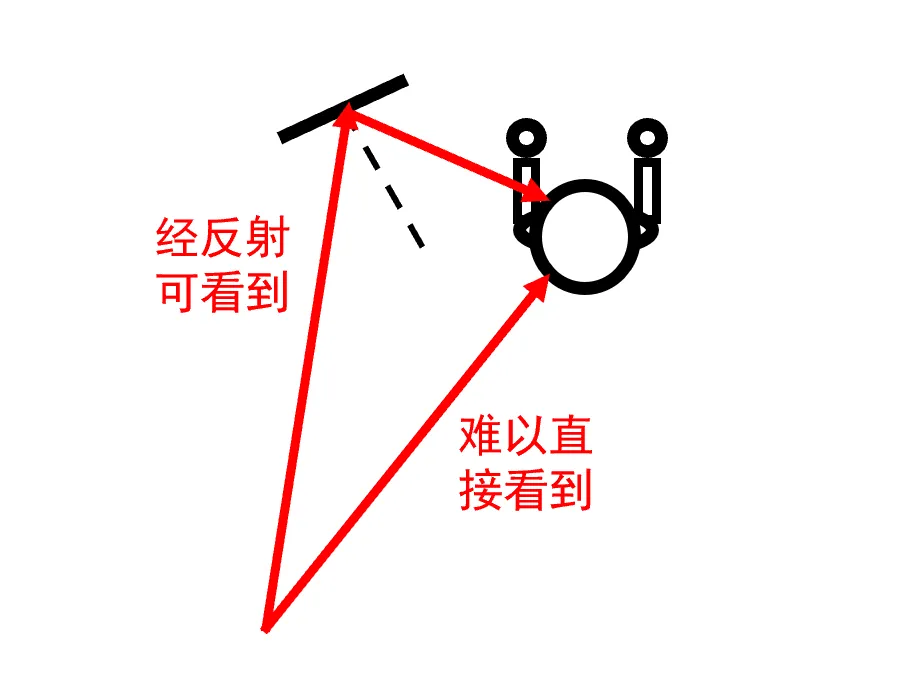
後視鏡擴大視野示意
雖然後視鏡可以一定程度上通過反射光線擴大駕駛員的視野,但是由於其尺寸和位置的限制,依然有區域無法覆蓋到。
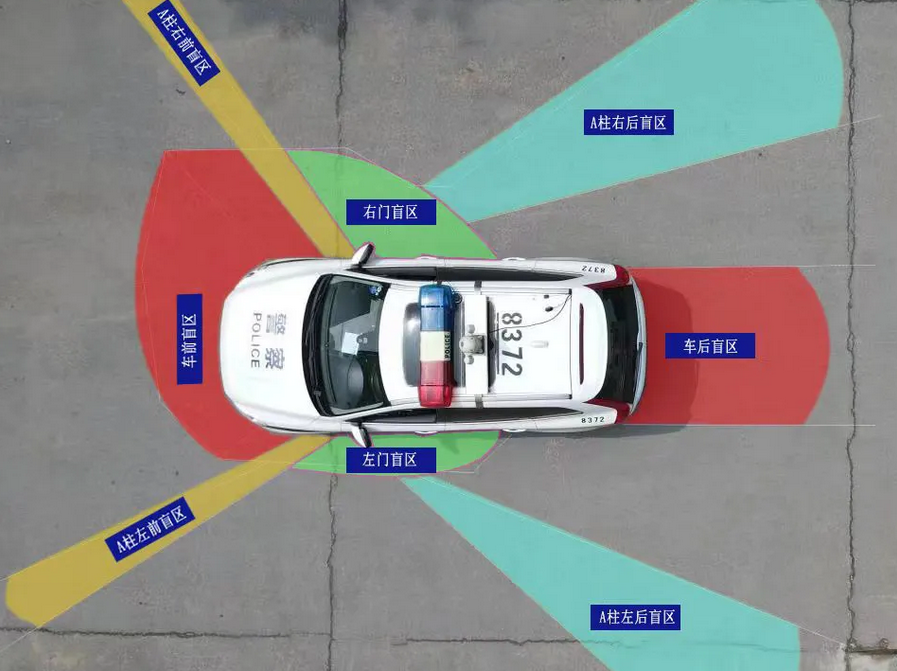
轎車盲區示意
對於常見的轎車型汽車,其盲區主要可以分為:前側盲區、後側盲區、兩側後視鏡盲區、兩側 AB柱盲區等。前側盲區主要是由於引擎蓋前區域被遮擋,而後側盲區是因為車尾部的部分區域在後視鏡可觀察範圍外。兩側後視鏡盲區是在大角度轉彎時通過後視鏡難以觀察到的區域,而 AB柱盲區是擋風玻璃兩側的柱子會遮擋部分前方視野所致。

A柱造成的遮擋
而大型汽車如貨車由於車體更大,駕駛時的盲區相比轎車也會更大。
然而值得注意的是,即使是劃定在盲區之外的區域,也不意味着絕對安全。因為駕駛員即使在注意力集中時也難以同時觀察到所有的方向,還會受到實時路況、天氣狀況以及對面來車的車燈亮度等因素的干擾。
可以這樣認為,真實情況下的「盲區」只會比上面介紹的更大!那麼,我們有什麼辦法幫一幫司機們呢?

更多的鏡子
當我們巧妙地利用鏡面反射這一原理,就可以創造出一些減小盲區的設計。比如在後視鏡上的輔助鏡片以及讓 A柱變「透明」的隱形裝置。
安裝在後視鏡上的輔助鏡片已經有不小的普及度,它也常被稱為廣角鏡或盲點鏡。由於這種鏡片是小凸面鏡,所以其可以覆蓋的視野範圍更大。通過下面的示意圖可以大致理解其原理。
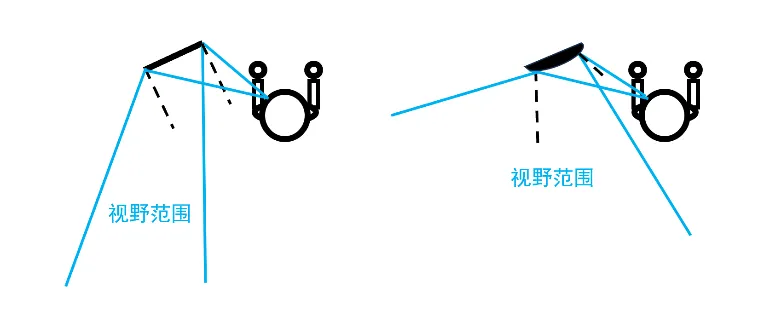
凸面鏡擴大視野的原理
這樣一來,司機便可以觀察到原先後視鏡不能覆蓋到的後輪等側後方的地方,有效壓縮了兩側盲區的大小。然而這種凸面鏡也會帶來一個潛在的問題,那就是使得畫面有一定的變形和失真。
司機在透過凸面鏡觀察後方的情況時,不太容易準確把握後方的物體、車輛等的實際距離,因此過度相信廣角鏡中的畫面容易產生誤判。
而下面要介紹的雙鏡片結構其實類似於潛水艇中潛望鏡的原理,即通過一對相互平行的平面鏡,將某一不在視野內的物體上發出的光經過兩次反射引導到人眼處,從而看見物體。
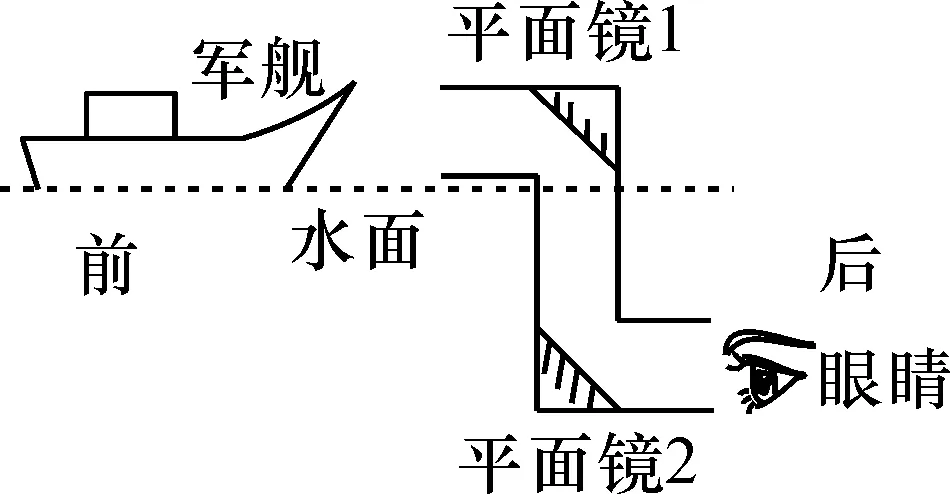
潛望鏡原理示意
在前面介紹過,AB柱會在駕駛過程中遮擋前方的部分視野,這會帶來很大的安全隱患。如果借用類似的思路,在合適的位置以合適的角度設置兩塊鏡片,就可以讓 AB柱後面被遮擋的物體可以被看到。
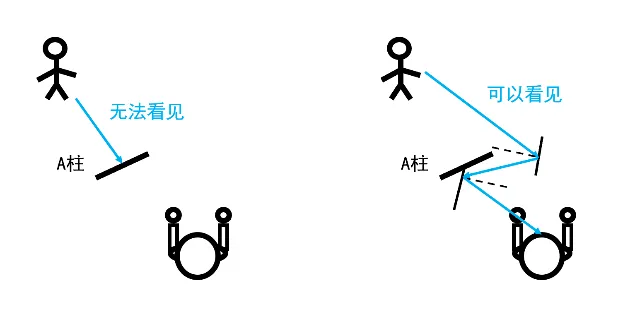
讓A柱「隱形」的裝置原理示意
當然,真實應用於汽車中時,為了保證美觀等更加實際的要求,需要更複雜的設計。當然,也可以通過攝像頭將外界的畫面呈現在 A柱的內側來實現類似的效果。
讓車擁有眼睛
上面介紹的廣角鏡以及 A柱「隱形」裝置主要是通過光學的方法削減司機在駕駛時的盲區範圍。然而對於更加廣泛的視覺死角,以及考慮到司機有限的精力,僅僅通過擴展司機的視野是不夠的。
於是,人們想到讓汽車擁有「眼睛」,即讓汽車本身可以主動判斷周遭的情況,並給予司機駕駛操作上有效的提醒甚至干預。說到這裏,可能很多讀者已經想到了一個詞:雷達。

沒錯,雷達正是我們最為熟知的進行物體定位以及測速的工具,其英文全稱直譯為「無線電探測和測距」。在定位方面,雷達發射出無線電脈衝後會等待並接收被物體反射回來的脈衝,得到往返傳播時間 dt。由於無線電是一種電磁波,我們可以用下式計算出其在某種介質中的速度。
其中 c和 n分別代表真空中光速以及某種介質(如空氣)的折射率。於是,物體距離雷達的距離就可以表示為:
如果需要在三維空間中實現定位,可以採取多基站的方法來實現,這在以往的文章中已經詳細解讀過了,有興趣可以回顧一下~那麼,雷達又是如何實現測速的呢?這就要提到我們所熟知的多普勒效應。
多普勒效應指的是物體輻射的波長會隨着波源和觀察者的相對運動而改變。比如對於聲波為代表的機械波,當一輛汽車(波源)向你駛來,你聽起來汽車發出的聲音音調會變高,即頻率增大;若波源遠離,音調會變低沉,即頻率減小。
光波也會出現類似的現象,只不過情況略微複雜:假定波源發出的波頻率為 f,而接收到的波頻率為 f』,則二者之間有關係:
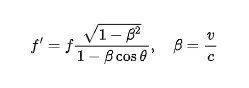
其中θ為波源與接收器的連線與波源速度方向的夾角。當然,在車載雷達判斷周圍車輛或行人的位置和速度時,情況會更複雜些。因為發出脈衝的裝置和接收裝置都在行進的車上,而反射該脈衝的物體也可能在行進。然而,只要認真考慮二者之間的相對運動,還是可以基於上述原理做出判斷。
實際廣義上的雷達不僅可以發射無線電,還可以通過發射紅外線、超聲波甚至激光等,其定位和測速的原理是相似的。根據發射脈衝的種類可以分為紅外雷達、超聲波雷達、毫米波雷達等。
有了這樣的定位和測速的裝置,汽車就可以掃描周遭的環境,並將信號傳給算法晶片進行分析。一旦發現有周圍物體快速靠近,就可以通過報警裝置警示司機或者通知周圍汽車、行人。在必要時,如發現與前車距離迅速接近時,汽車也可以啟動自動的剎車制動系統完成剎車流程,這大大增加了司機駕車的安全係數。
可以更智能
近些年,無人駕駛技術這一科技詞彙已經為人們所熟知,這也意味着在未來完全實現無人駕駛的時代,駕駛員將被完全解放,也不會再有「盲區」這個概念。那麼,這一切是如何做到的呢?這主要依賴於兩個方面:定位系統與環境感知。
由於互聯網技術的發展,我們逐漸可以以更快的速度實時與互聯網進行信息交換,這意味着一台行駛中的汽車也可以實時通過互聯網獲取自身的定位以及路況信息。可以設想,如果所有的汽車都與互聯網相連,相當於它們都可以在一定程度上擁有全局視角。
而兼具解像度高、精度高、抗干擾能力強等優點的激光雷達的普及,使得汽車對於周遭環境的探測能力絕非簡單的定位與測速。比如車載的三維激光雷達可以通過高速旋轉實時繪製出車輛周邊的三維空間地圖,同時測量出周邊其他車輛在三個方向上的距離、速度、加速度、角速度等信息。
除了上面所說的定位系統與環境感知,我們還可以聯想到最近不斷發展的計算機視覺。未來的汽車不僅可以充分感知周遭的環境,甚至可以提取並識別其中的不同元素,並有選擇性地做出響應、警示、避讓等操作。
當科技真的出手,我們不僅可以減小盲區,甚至可以消除盲區;不僅可以幫助駕駛員,甚至可以解放駕駛員。期待更多的科學技術變得成熟、普及並最終成為每個人出行安全的守護神。也希望在通往這一理想化終點的路上,我們都能用更好的安全意識為自己和他人負責。




















{kind=link}