「現在踩下的油門,都是以後吹牛逼的資本」
前幾天,特斯拉CEO埃隆·馬斯克(Elon Musk)在Twitter上轉發關於現款FSD Beta的消息時透露,FSD Beta V9.0已經基本準備就緒,跟現有系統相比,會有重大進步。而馬斯克的這段話里,最重要的是最後一句:Pure vision,no radar(純視覺,沒有雷達)。
有網友馬上向馬斯克提問:這是不是意味着,目前特斯拉汽車上配備的唯一一顆雷達傳感器會被取消?還是依然會作為備用?馬斯克的回答倒也很堅決:Remove(取消)。
眾所周知,馬斯克一直反對雷達,稱純視覺模式要比雷達先進得多。而外界對「純視覺工作模式」一直持批評的態度,認為這是一種倒退。
那麼純視覺模式是不是真的是一種倒退?馬斯克為什麼這麼反對雷達?

1用攝像頭模擬人眼
純視覺挑戰人腦
要搞清楚這個問題,首先得知道什麼是純視覺模式。
汽車自動駕駛的一項核心技術,就是車輛能感知並識別到路面、周圍車輛、建築物等一切可能影響汽車駕駛安全的因素,然後系統根據這些數據做出判斷,完成操控汽車的目的。
要感知路面上的這些信息,傳統的做法是用雷達。雷達,也就是"無線電探測和測距",是利用電磁波探測目標的電子設備。雷達發射電磁波對目標進行照射並接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、高度等信息。
簡單的理解就是,比如我的車上有一個雷達,向前發射一個電磁波,如果前面也有一輛車,那麼這個電磁波碰到前車就會折返,利用這些信息,就能推測出兩輛車之間的距離。
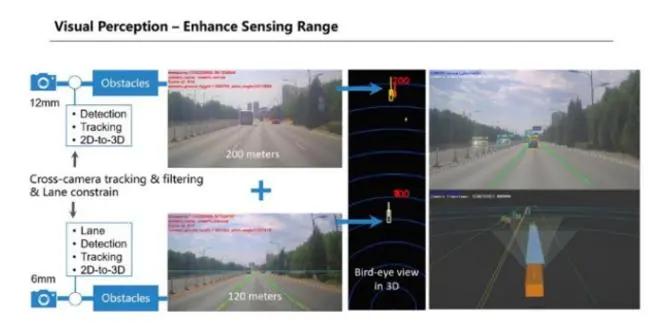
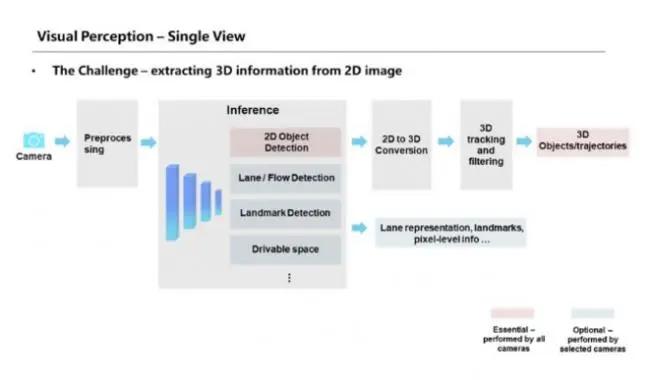
而純視覺模式,利用的是攝像頭。攝像頭拍攝到周邊的畫面,然後系統根據畫面的信息,計算出周圍的車輛、道路等信息。最直觀的比喻,就相當是人的眼睛,我們人眼看到前面的信息後,大腦就會對這些信息做出判斷,距離近了就剎車,距離遠了可以加速跟上。純視覺其實就是利用攝像頭、系統算法等方式,模仿人在做的事。

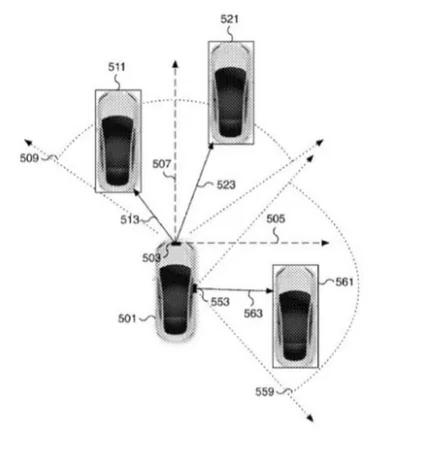
當然,人只有兩隻眼睛,而汽車可以裝很多的攝像頭,當攝像頭足夠多的時候,就可以完成車輛周圍360°的覆蓋,這樣利用系統強大的算法,就能實時計算出車輛行駛時周圍的路況,完成自動駕駛。

乍看之下,好像兩種方法都可以,不過很多人反對純視覺的一個理由是,純視覺模式在應對突發狀況、極端情況時,可能不如雷達安全。比如突然衝出的汽車、行人、動物,以及極端的天氣等等,人也會反應不過來,機器要想做得比人類更好,是個巨大的挑戰。
2特斯拉純視覺FSD
現在到底有多麼厲害?
純視覺的特斯拉FSD到底已經做到什麼程度了?馬斯克提到的純視覺、無雷達版本的FSD Beta9.0版本,還沒有正式推出,所以目前能體驗到的最新版本是FSD Beta V8.2。這個版本應該是目前特斯拉正式推出的,純視覺模式最新的版本了。
此前,已經有不少國外的網友體驗過這麼版本了,從他們的評測視頻可以看到,這個版本的純視覺模式,看起來似乎已經很完整了。

首先,在路口綠燈時處,它會自動減速、識別紅綠燈,然後駕駛通過。
路口遇到紅燈,它跟跟在前車後面,等到綠燈時,再駛過路口。
轉彎匯入主路時,在沒有紅綠燈的情況下,它可以提前識別過往的車輛,等待安全時,再進行轉彎。
在商場停車場這種內部道路,它也可以自動識別過往的車輛,進行避讓。

可以看到,基礎駕駛的部分,FSD Beta V8.2的純視覺工作模式已經基本可以滿足使用的需求了,但是有一些特殊的路況下,還是會有處理不好的情況。比如左轉之後,道路的左車道上停着車,FSD會默認跟在這些車後面,但是車停下來的位置位於十字路口中間,這就非常危險了。而此時,隔壁的車道卻很空,而FSD並沒有切換車道,只能人工干預進行操作。

總的來說,,FSD Beta V8.2的純視覺工作模式只能說基本可用,複雜一點的情況,處理的還不是很好。但馬斯克也表示,即將到來的9.0版本,會有非常大的進步,到底如何,也只能等真的推出後才能判斷。
3採用純視覺方案的並不止特斯拉一家
其實就目前來說,視覺+雷達的組合方案,會比純視覺更加成熟,那麼馬斯克為什麼一心要做純視覺,拋棄雷達呢?
首先是成本高,自動駕駛用到的雷達、激光雷達和超聲波傳感器,目前價格普遍較高。去年底,華為發佈了96線車規級激光雷達,接下來的目標是迅速開發出100線激光雷達,並且未來計劃將激光雷達的成本降低至200美元,甚至是100美元。可見激光雷達的好大家都知道,關鍵就是太貴。
特斯拉近日獲得了一項「使用視覺圖像數據估計物體屬性」的新專利,專利的說明里提到,隨着傳感器數量和類型的增加,系統的複雜性和成本也在增加,因為每增加一個傳感器都會增加自動駕駛系統的輸入帶寬要求。因此,需要找到車輛上傳感器的最優配置。這種配置應該限制傳感器的總數,而不限制捕捉數據的數量和類型,以準確描述周圍環境,安全控制車輛。
除了特斯拉,在做純視覺自動駕駛的還有兩家,分別是Mobileye和Apollo Lite。
SuperVision系統是 Mobileye打造的綜合性的智能駕駛系統。傳感器方面,SuperVision與特斯拉 Autopilot HW2.0唯一的區別在於特斯拉的前置三目方案在這裏變成了前置雙攝像頭(非傳統的「雙目」攝像頭原理),分別扮演窄視野遠距離和寬視野短距離的角色,簡單來說,去掉一顆攝像頭,也能實現既看得寬,又看得遠的需求。所以,Mobileye算是以7顆攝像頭完成了360°的覆蓋。

除此之外,Mobileye在左右後視鏡和正前正後配備了4顆環視攝像頭,用於360影像和自動泊車的感知。去年,領克汽車在北京車展前夕發佈了旗下首款純電動車型Zero concent,搭載了來自 Mobileye的 SuperVision系統。

此外,百度的Apollo Lite同樣採用的是純視覺技術。
在前置三目和後置攝像頭上,Apollo Lite與特斯拉 Autopilot沒有區別,但在側面感知上,Apollo Lite在特斯拉左右各2顆側面感知攝像頭的基礎上增加了2顆環視攝像頭做感知補充。
目前自動駕駛或者輔助駕駛,都在快速成長,我始終相信自動駕駛真正到來不會太久了。而在實現這一目標的路上,到底是純視覺還是雷達,其實並沒有那麼重要,只要技術足夠成熟,就是一個好的產品。
對消費者來說,也是更願意看到有更多的不同方法的產品,這樣選擇的餘地也就更大。有了競爭,價格也會越來越低,這對普通消費者來說都是好事。




















{kind=link}